

26.Mar 2026
Telescopic manipulator with MR 85 gripper for tank handling
At first glance, handling tanks may not seem like a particularly demanding operation. Loads weighing tens of kilograms are completely standard in material handling. However, the real challenge arises when it is necessary to grip the tank precisely, move it stably, and position it safely. All of this often takes place in confined spaces and without the possibility of manual correction.

A tank is also not a “compliant” load. Its cylindrical shape and square versions with insulation cladding make gripping more difficult. The center of gravity is not always easy to estimate, and during lifting the load tends to rotate and deviate. When handled using a standard hook or simple slings, the operator must hold, balance, and correct the load position manually. The greatest risks arise precisely at this stage—not only in terms of safety but also in terms of the quality of subsequent operations.
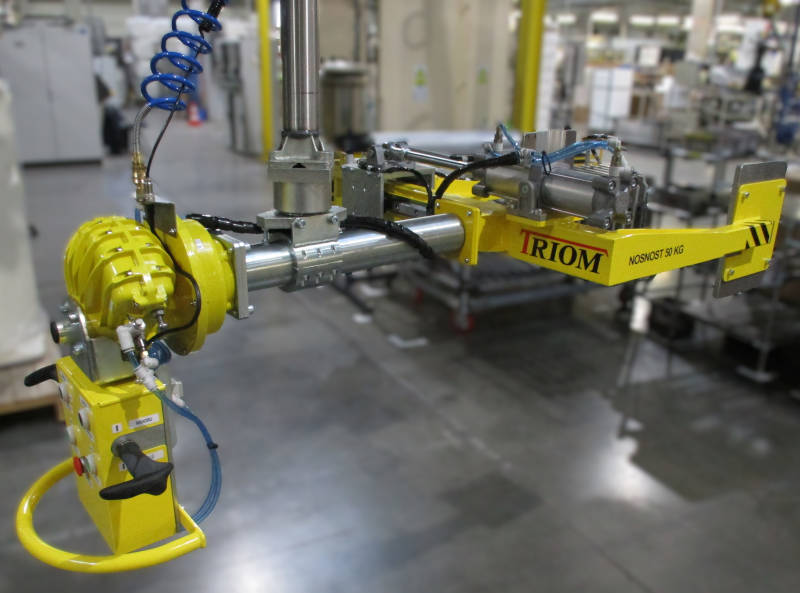
The MR 85 telescopic manipulator with gripper was developed specifically for this type of tank handling. It reliably solves not only the lifting itself, but the entire subsequent handling process—from gripping to final placement. Since the manipulator is designed according to specific customer requirements, it fits perfectly into both preceding and subsequent processes.
Design tailored to the production process
The manipulator is based on a traveling system that allows movement within a defined working area. A telescopic arm is mounted on the trolley. Its design emphasizes precise guided movement without any unwanted play.
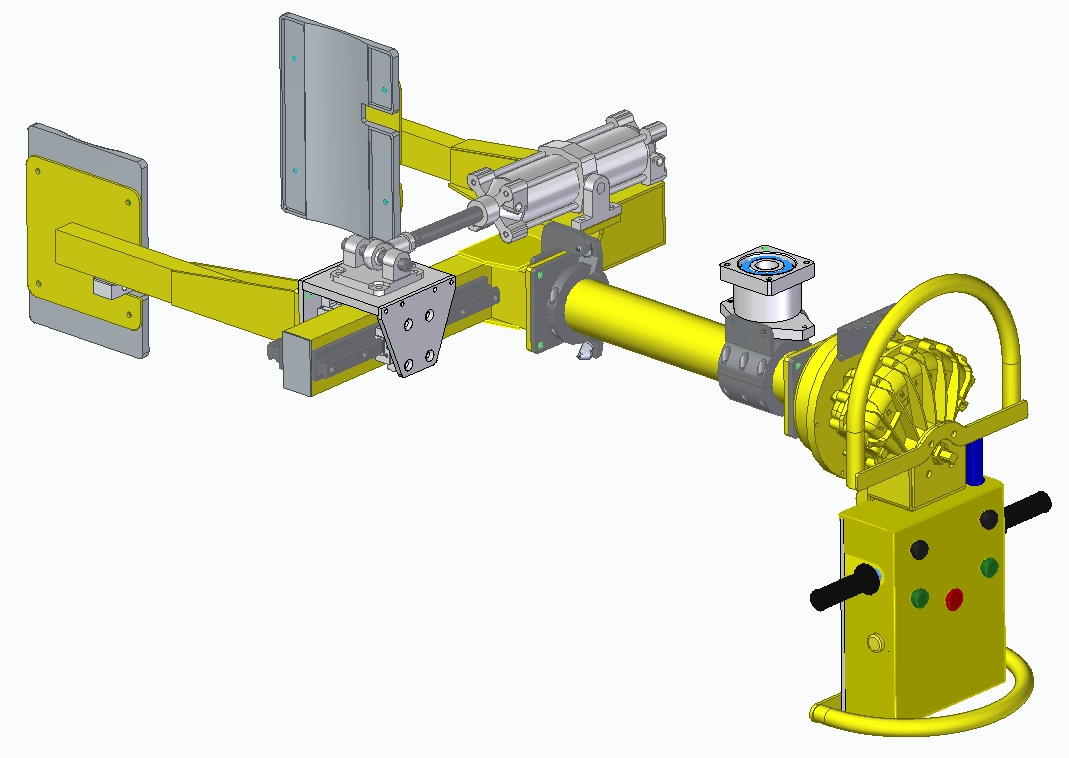
The telescope consists of a fixed and a moving tube mounted in sliding bushings. This ensures both smooth movement and continuous control. Lifting is performed by an electric chain hoist, with the chain running through the center of the telescope. The entire system remains compact and clear, without external elements that could interfere within the workspace.
The manipulator is not an isolated element—it is designed as an integral part of the working cycle, where individual movements are naturally combined. The operator does not deal with separate steps; the entire handling process forms a logical whole.
Technical parameters of the manipulator
Power sources
- bridge travel – electric
- manipulator travel on the bridge – manual
- lifting – electric
- load clamping – pneumatic
- load rotation – pneumatic
- power supply: top
Hoist: GIS GP500/1NFU
- lifting medium: chain
- hook: single
- motor power: 0.72 kW
- voltage: 3 × 400 V / 50 Hz
- lifting speed: adjustable (default setting 2.4–9.6 m/min)
Tank gripper
- max. gripper capacity: 50 kg
- dimensions: approx. 1835 × 905 × 618 mm
- operating air pressure: 0.55–0.6 MPa
- drawing documentation: CH 49.1.00.00-U1
- weight of telescopic manipulator with gripper: 175 kg
- hoist weight: 29 kg
- gripper weight: 100 kg
Perfect tank gripping
The gripper itself is located at the lower end of the telescope and forms the active part of the device. Its design corresponds to the geometry of the handled tanks—both cylindrical and square insulated versions.
The gripper is based on a fixed and a movable jaw, with the movement of the movable jaw ensured by linear guidance. This is essential, as clamping occurs along a precisely defined axis. A pneumatic cylinder provides sufficient clamping force for stable handling without any risk of damaging the surface of the load.
Once the tank is gripped, the device takes full control of further movement. There is no need for manual holding or additional corrections. The load moves exactly as guided by the manipulator structure.
The gripper also includes a rotating mechanism allowing 180° rotation around the longitudinal axis. This movement is smooth and can be stopped instantly. The operator can thus change the orientation of the tank without losing control or causing oscillation.
Control adapted to the workplace layout
Many handling issues do not arise from the equipment itself, but from the way it is controlled. If the operator must coordinate multiple controls simultaneously, the likelihood of errors increases. Therefore, the MR 85 uses controls based on natural operator movement.
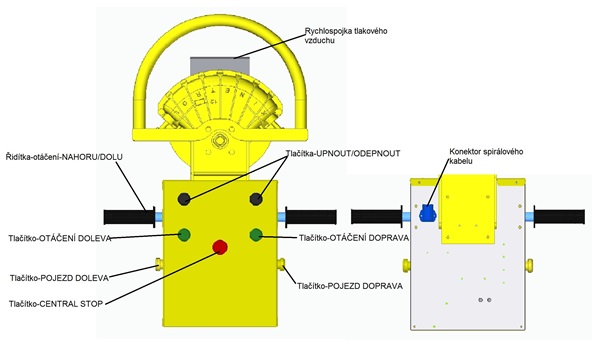
Lifting and lowering are controlled by rotary handles, with speed proportional to the degree of rotation. This allows more intuitive control.
Travel combines electric and manual movement. Coarse positioning is ensured by electric travel along the track, while fine positioning is performed manually by the operator guiding the manipulator.
Clamping and releasing the load is controlled with both hands. This is not a complication but an important safety feature, forcing the operator to keep hands out of the jaw working area and preventing accidental activation.
Safety weighing system with load cells
A specific feature of this solution is the safety weighing system. Under normal load, it remains unnoticed, but in the background it monitors and prevents errors caused by incorrect handling.
A typical example is continued lowering even after the load has already been placed. At first glance nothing happens, but inside the telescope the chain continues unwinding. The operator cannot see this, yet the consequences can be critical, as releasing the load could cause the gripper to fall uncontrollably.
The weighing system detects such situations and automatically stops further movement. It monitors both overload and underload conditions. It responds visually and acoustically, providing an additional level of safety independent of operator attention.
The system consists of three pressure load cells and an evaluation unit with a display showing current weight, a yellow light UNDERLOAD/OVERLOAD, and a red ALARM light with acoustic signaling.
Custom solution tailored to specific needs
The MR 85 manipulator is not a universal device for any application. It is designed specifically for a particular type of load, weight range, and handling method. This is where its major added value lies.
TRIOM builds its projects on the principle that handling equipment must reflect real workplace conditions, not catalog solutions. Each design begins with an analysis of the load, current handling methods, bottlenecks, operator improvisation, and risks of damage or injury. The goal is to deliver a solution that precisely matches real conditions.
The focus is not only on lifting, but on the entire handling process—from gripping, through transfer, to final placement. The aim is always to deliver equipment that integrates naturally into operation, ideally without the need for major changes or adjustments.
In the case of tank handling, this represents a fundamental shift. A task previously dependent on operator experience, estimation, and manual correction has been transformed into a controlled and repeatable process. The operator no longer needs to continuously correct the load, but simply guides it. The manipulator design ensures stability, precision, and safety.
This highlights the difference between standard lifting equipment and a true handling solution. Lifting a load is not a problem even for conventional equipment—but our solution ensures controlled and safe handling every day, throughout the entire operation.